1、时序差分(TD)与贝尔曼方程的关系
时序差分(Temporal Difference, TD)方法与贝尔曼方程是强化学习中理论与算法的核心结合。贝尔曼方程提供了值函数的递归数学定义,而 TD 方法则是通过采样数据来逼近这一方程的解。两者的关系可以从以下四个层面理解:
(1) 贝尔曼方程:理论基石
贝尔曼方程是强化学习中最基础的数学工具,它定义了状态值函数 V(s)或动作值函数 Q(s,a) 的递归关系:

(2)TD 方法:贝尔曼方程的采样实现
TD 方法通过实际交互的样本数据,用单步或几步经验近似贝尔曼方程中的期望值,从而避免了对环境模型(状态转移概率 p(s′∣s,a)的依赖。
TD 更新公式(以 TD(0) 为例):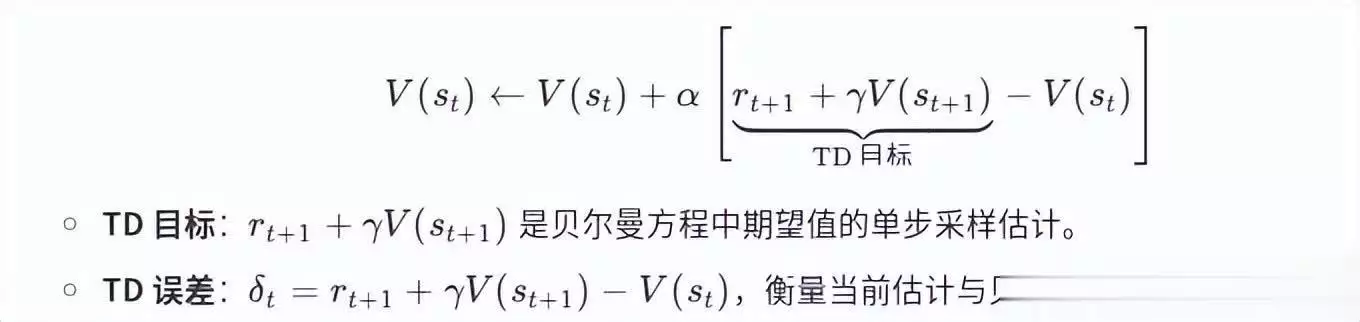
(3)TD 是贝尔曼方程的随机近似算法
贝尔曼方程的解是值函数的理想值,而 TD 方法通过以下步骤逼近这一解:
采样替代期望:用实际交互的单步样本 (St,At,Rt+1,St+1)代替贝尔曼方程中的期望计算。 迭代更新:逐步调整值函数估计,使 TD 误差最小化。 收敛性:在 Robbins-Monro 条件下(如适当衰减的学习率 α),TD 方法能收敛到贝尔曼方程的解。(4)总结
贝尔曼方程:定义了值函数的递归数学关系,是强化学习的理论核心。 TD 方法:通过采样和迭代更新,将贝尔曼方程中的期望计算转化为实际可行的无模型学习算法。 核心关系: TD 方法是贝尔曼方程的随机近似实现。 TD 的更新目标直接对应贝尔曼方程的右侧期望项。 TD 的收敛性依赖于贝尔曼方程的理论保证。通过这种关系,TD 方法在无模型、高维状态空间中实现了高效学习,成为强化学习中最广泛应用的算法家族之一。
2、时序差分(TD)、贝尔曼方程与马尔可夫性质的关系
在强化学习中,马尔可夫性质是时序差分(TD)方法、贝尔曼方程以及大多数经典强化学习算法的核心基础。三者的关系可以总结为:
马尔可夫性质是理论前提 → 贝尔曼方程是数学工具 → TD方法是实践算法。
(1)马尔可夫性质:一切的基础
定义马尔可夫性质(Markov Property)表明:未来状态仅依赖于当前状态和动作,与历史无关。数学表述为:
作用简化问题:将复杂的历史依赖简化为仅当前状态的依赖。
支撑MDP框架:马尔可夫决策过程(MDP)假设环境满足马尔可夫性质,是强化学习的标准建模工具。
(2)贝尔曼方程:马尔可夫性的数学体现
贝尔曼方程的成立直接依赖马尔可夫性质。以状态值函数为例:
马尔可夫性的体现
状态转移独立性:下一状态 s′仅依赖当前状态 s和动作 a,而非历史。 递归分解:长期回报 Vπ(s)被分解为即时奖励 r和后续状态的折扣值 γVπ(s′)。 动态规划可行性:若无马尔可夫性,无法将全局问题递归分解为局部子问题。(3)TD方法:马尔可夫性下的无模型学习
TD方法(如Q-Learning、SARSA)是贝尔曼方程的无模型实现,其有效性同样依赖马尔可夫性。
TD更新的马尔可夫性依赖
单步更新:TD利用当前状态 st、动作 at、奖励 rt+1 和下一状态 st+1 进行更新。 隐含假设: 下一状态 st+1 仅由 st 和 at 决定(马尔可夫性)。 若环境不满足马尔可夫性(如部分可观测问题),TD的更新目标将包含隐藏的历史信息误差。(4)总结
马尔可夫性质是强化学习的基石,确保状态转移和值函数递归分解的合理性。 贝尔曼方程是马尔可夫性下的数学工具,定义值函数的动态关系。 TD方法是贝尔曼方程的无模型实现,依赖马尔可夫性通过采样高效学习。三者关系链:马尔可夫性 → 贝尔曼方程 → TD方法若环境不满足马尔可夫性,这一链条将断裂,需调整状态表示或算法设计(如使用RNN、POMDP)。
3、满足与不满足马尔可夫性质的环境对比
(1)满足马尔可夫性质的环境
定义:未来状态仅依赖当前状态和动作,与历史无关。特点:
状态完整性:当前状态包含所有影响未来状态的信息。 明确状态转移概率:下一状态仅由当前状态和动作决定,可用 p(s′∣s,a)p(s′∣s,a) 描述。示例:
棋盘游戏(如国际象棋): 当前棋盘布局(状态)完全决定下一步所有可能走法。 无需考虑之前的落子顺序,只需当前布局即可决策。 机器人导航(确定性环境): 机器人当前位置和动作(如“向左”)明确决定下一位置。 例如:网格世界中,移动指令直接对应坐标变化。 简单赌博机(Bandit): 每次拉臂的奖励仅由当前选择的臂决定,与之前的选择无关。(2)不满足马尔可夫性质的环境
定义:未来状态依赖历史信息,而非仅当前状态和动作。特点:
状态信息缺失:当前状态未捕获所有影响未来的关键因素。 历史依赖性强:需通过历史状态或动作预测未来。示例:
部分可观测环境(POMDP): 真实状态:满足马尔可夫性,但智能体无法完全观测。 观测状态:因信息缺失导致非马尔可夫性。 例子: 机器人通过噪声传感器获取环境信息(如模糊的摄像头画面)。 扑克游戏中,玩家无法看到对手的手牌(隐藏信息)。 时间序列依赖任务: 股票价格预测:未来价格依赖长期趋势(如过去30天的均线)。 自然语言处理:句子的语义依赖上文所有词语(需LSTM/Transformer建模长程依赖)。 资源消耗型任务: 电池供电机器人:移动成功率受剩余电量影响,但电量未纳入状态。 库存管理:未来需求依赖季节性历史销售数据,但状态仅包含当前库存。(3)判断标准
标准
满足马尔可夫性
不满足马尔可夫性
状态完整性
当前状态包含所有关键信息
状态缺失关键历史或隐藏信息
转移概率依赖
仅依赖 (s,a)(s,a)
依赖历史轨迹 (s0,a0,...,st)(s0,a0,...,st)
值函数更新
可用贝尔曼方程递归分解
需扩展状态或使用记忆机制
典型算法适用性
TD、Q-Learning、DP
RNN、POMDP、DRQN
(4)总结
满足马尔可夫性:环境动态完全由当前状态和动作决定,适合经典强化学习算法(如TD、Q-Learning)。 不满足马尔可夫性:需扩展状态表示或引入记忆机制,常见于部分可观测、时间序列依赖或资源消耗型任务。 核心区别:状态的完整性和历史依赖性决定了马尔可夫性质是否成立。以下是一个结合 马尔可夫性质、贝尔曼方程 和 时序差分(TD) 的 Python 程序示例,通过一个简单的网格世界环境,展示它们的核心关系:
程序目标
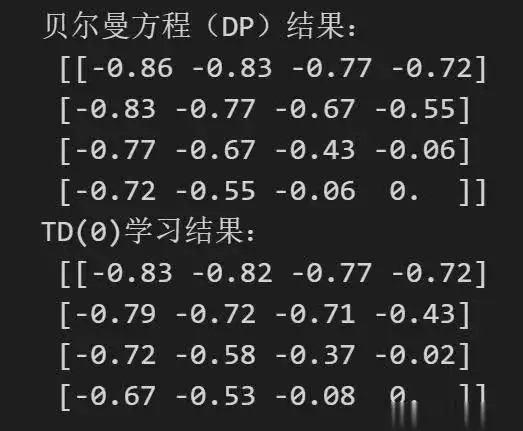
马尔可夫性质:环境状态转移仅依赖当前状态和动作。 贝尔曼方程:通过动态规划(DP)迭代计算状态值函数。 TD方法:通过采样轨迹在线更新值函数。 对比DP与TD:验证两者在马尔可夫环境下的收敛一致性。 import numpy as npimport matplotlib.pyplot as plt# ====================== 环境定义(马尔可夫性质) ======================class GridWorld:"""4x4网格世界,终点在右下角,移动奖励-0.1,到达终点奖励+1"""def __init__(self):self.size = 4self.terminal = (3, 3)self.actions = [up, down, left, right]def step(self, state, action):"""马尔可夫性质:下一状态仅依赖当前状态和动作"""i, j = stateif action == up:next_i = max(i - 1, 0)next_j = jelif action == down:next_i = min(i + 1, self.size - 1)next_j = jelif action == left:next_i = inext_j = max(j - 1, 0)elif action == right:next_i = inext_j = min(j + 1, self.size - 1)next_state = (next_i, next_j)# 奖励函数reward = 1.0 if next_state == self.terminal else -0.1return next_state, reward# ====================== 动态规划(贝尔曼方程求解) ======================def bellman_dp(env, gamma=0.9, theta=1e-4):"""贝尔曼方程迭代求解状态值函数"""V = np.zeros((env.size, env.size))policy = np.ones((env.size, env.size, len(env.actions))) / len(env.actions)# 均匀随机策略while True:delta = 0for i in range(env.size):for j in range(env.size):if (i, j) == env.terminal:continuev_old = V[i, j]v_new = 0for a_idx, action in enumerate(env.actions):next_state, reward = env.step((i, j), action)next_i, next_j = next_state# 贝尔曼方程求和:Σπ(a|s)Σp(s|s,a)[r + γV(s)]v_new += policy[i, j, a_idx] * (reward + gamma * V[next_i, next_j])V[i, j] = v_newdelta = max(delta, abs(v_old - V[i, j]))if delta < theta:breakreturn V# ====================== 时序差分(TD(0)学习) ======================def td_learning(env, gamma=0.9, alpha=0.1, episodes=100):"""TD(0)在线更新值函数"""V = np.zeros((env.size, env.size))for _ in range(episodes):state = (0, 0)# 起点while state != env.terminal:# 随机选择动作(均匀策略)action = np.random.choice(env.actions)next_state, reward = env.step(state, action)i, j = statenext_i, next_j = next_state# TD更新:V(s) ← V(s) + α[r + γV(s) - V(s)]V[i, j] += alpha * (reward + gamma * V[next_i, next_j] - V[i, j])state = next_statereturn V# ====================== 运行与可视化 ======================if __name__ == "__main__":env = GridWorld()# 动态规划求解V_dp = bellman_dp(env)print("贝尔曼方程(DP)结果:\n", np.round(V_dp, 2))# TD学习V_td = td_learning(env, episodes=1000)print("TD(0)学习结果:\n", np.round(V_td, 2))# 可视化对比plt.figure(figsize=(10, 4))plt.subplot(1, 2, 1)plt.imshow(V_dp, cmap=hot)plt.title("Dynamic Programming (Bellman)")plt.colorbar()plt.subplot(1, 2, 2)plt.imshow(V_td, cmap=hot)plt.title("TD(0) Learning")plt.colorbar()plt.show()代码解析
1. 马尔可夫性质
环境类 GridWorld: step 方法实现状态转移,下一状态仅依赖当前状态和动作(无历史依赖)。 例如:在状态 (1,1) 执行动作 "right" 后,必然转移到 (1,2)。2. 贝尔曼方程(动态规划)
函数 bellman_dp: 遍历所有状态,通过贝尔曼方程迭代更新值函数: 收敛条件:值函数变化小于阈值 theta。3. 时序差分(TD(0))
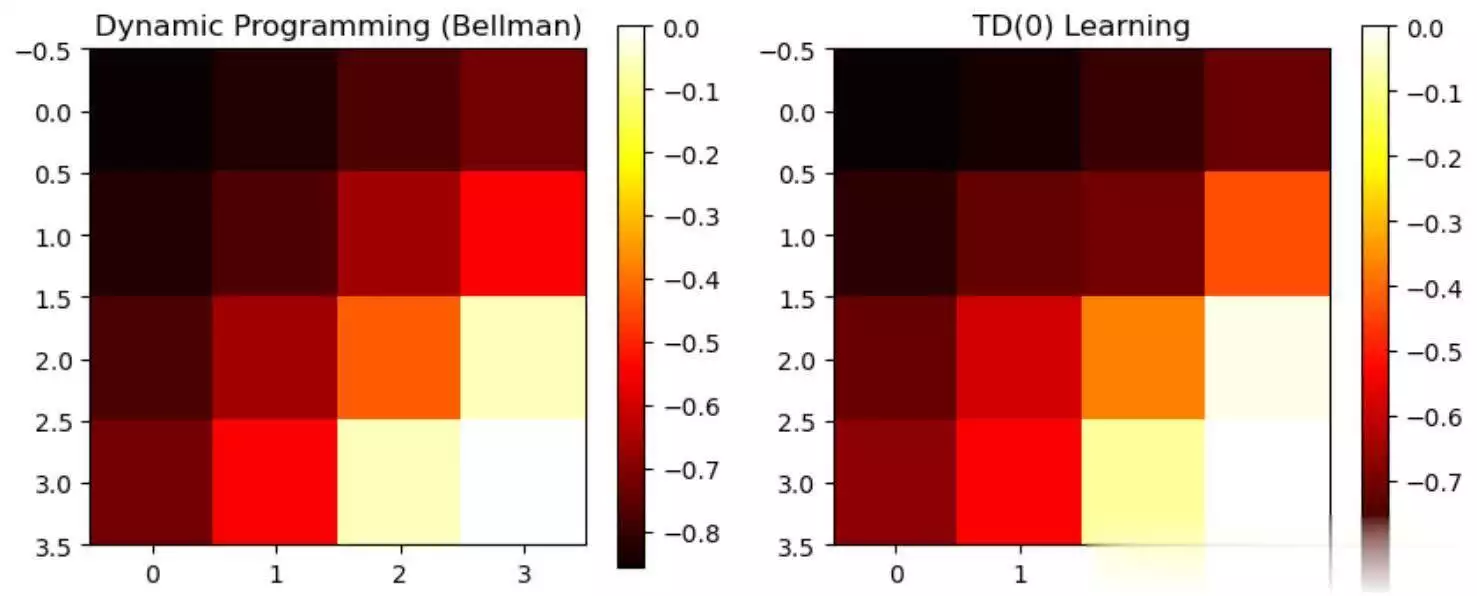
函数 td_learning: 通过采样轨迹在线更新值函数: 体现马尔可夫性:仅用当前状态和动作生成下一状态。4. 可视化对比
热力图显示 DP 和 TD 学习到的值函数: DP 直接求解贝尔曼方程(精确解)。 TD 通过采样逼近贝尔曼方程(近似解)。