厦门大学的这个专利,和众多学校发明专利一样,有一个共同特点,就是公式多,但是学校的成果偏向于理论前沿,值得思考,特别是这个控制方法和逻辑。
本文主要内容:该专利提出了一种针对自动驾驶分布式驱动电动汽车的横向与侧倾综合控制方法,属于汽车智能安全与自动驾驶技术领域。其核心是通过融合车载传感器数据(GPS、CCD),建立考虑侧倾效应、执行器故障、参数不确定性和时变特性的Takagi-Sugeno模糊横向控制模型,并设计鲁棒控制策略和模糊观测器,最终实现车辆在复杂工况下的稳定路径跟踪与侧倾控制。
创新点:首次在横向控制模型中同时纳入侧倾动力学和执行器故障模型(偏置、部分失效),解决了多因素耦合对车辆稳定性的影响;采用akagi-Sugeno模糊模型处理车辆动力学的参数不确定性和时变特性,增强了系统对复杂工况的适应能力,同时结合H∞鲁棒控制,确保在外部扰动(如侧倾效应、执行器故障)下仍能保持闭环系统的稳定性;最后引入遗传算法优化附加横摆力矩的分配,平衡各轮胎纵向力的约束(如最大值、最小值),提升控制效率与能量利用率。
解决的主要问题:传统横向控制方法未充分耦合侧倾运动,导致车辆在弯道或紧急变道时易失稳。本发明通过三自由度动力学模型和模糊观测器,直接抑制侧倾对横向控制的干扰。利用模糊观测器弥补传感器局限性,实现对侧倾状态的实时估计,保障控制系统的闭环性能。
文章链接:通过点击左下角的阅读原文进行在线阅读或下载文件
关注我,共同交流,一起成长
文章原文
(54)发明名称
自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法
(57)摘要
自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,属于汽车智能安全与自动驾驶技术领域。通过车载传感系统采集自动驾驶分布式驱动电动汽车的行驶状态信息和参考路径信息,考虑侧倾效应和执行器故障,建立具有参数不确定和时变特性的Takagi‑Sugeno模糊横向控制模型,设计一种自动驾驶分布式驱动电动汽车鲁棒横向和侧倾综合控制方法,同时针对自动驾驶分布式驱动电动汽车行驶过程中侧倾角和侧倾角速度的不可测性,提出基于Takagi‑Sugeno模型的观测器。克服了侧倾效应和执行器故障对自动驾驶分布式驱动电动汽车横向运动控制的影响,提高了自动驾驶分布式驱动电动汽车的自主行驶性能。
权 利 要 求 书
1.自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,其特征在于包括以下步骤:
1)通过车载传感系统实时获取自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息;
2)基于步骤1)获取的信息,考虑侧倾效应和执行器故障,建立描述参数不确定性和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向控制模型;
3)设计基于Takagi-Sugeno模糊横向控制模型的自动驾驶分布式驱动电动汽车鲁棒控制策略,实现横向与侧倾耦合运动的多目标协同控制,求解出行驶所需要的前轮转角和附加横摆力矩;
4)针对自动驾驶分布式驱动电动汽车侧倾角和侧倾角速度的不可测性,构建自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊观测器;
5)将期望附加横摆力矩分配至所有轮胎执行器,设计自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配控制方法,求解出所需的轮胎纵向力,通过轮毂电机控制实现对轮胎纵向力的跟踪控制,进而实现自动驾驶分布式驱动电动汽车横向与侧倾综合控制。
2.如权利要求1所述自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,其特征在于在步骤1)中,所述通过车载传感系统实时获取自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息的具体步骤为:
(1)通过车载GPS系统实时获取车辆的纵向速度、横向速度和横摆角速度;
(2)通过车载CCD系统实时获取预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息、预瞄点处车辆到参考路径的横向距离偏差信息;
(3)对由GPS和CCD系统获取的自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息进行信息融合。
3.如权利要求1所述自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,其特征在于在步骤2)中,所述建立描述参数不确定性和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向控制模型的具体步骤为:
(1)忽略自动驾驶分布式驱动电动汽车的垂直运动和俯仰运动,建立描述自动驾驶分布式驱动电动汽车横向、横摆和侧倾动力学特性的的三自由度动力学模型;
(2)基于预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息和预瞄点处车辆到参考路径的横向距离偏差信息,建立自动驾驶分布式驱动电动汽车的运动学模型;
(3)考虑自动驾驶分布式驱动电动汽车的执行器存在偏置故障和部分失效故障问题,构建自动驾驶分布式驱动电动汽车的执行器故障模型;
(4)结合自动驾驶分布式驱动电动汽车的三自由度动力学模型和运动学模型,考虑侧倾效应和执行器故障,建立描述参数不确定和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向控制模型。
4.如权利要求1所述自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,其特征在于在步骤3)中,所述设计基于Takagi-Sugeno模糊横向控制模型的自动驾驶分布式驱动电动汽车鲁棒控制策略,实现横向与侧倾耦合运动的多目标协同控制,求解出行驶所需要的前轮转角和附加横摆力矩的具体步骤为:
(1)设计自动驾驶分布式驱动电动汽车横向与侧倾综合的鲁棒H ∞ 状态反馈控制构型;
(2)将所设计的鲁棒H ∞ 状态反馈控制构型代入自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊横向控制模型,分析自动驾驶分布式驱动电动汽车闭环控制系统的稳定性;
(3)推导自动驾驶分布式驱动电动汽车横向与侧倾鲁棒H ∞ 状态反馈综合控制器存在可行解的线性矩阵不等式条件,得到满足自动驾驶分布式驱动电动汽车闭环系统H ∞ 性能的反馈增益矩阵。
5.如权利要求1所述自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,其特征在于在步骤4)中,所述构建自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊观测器的具体步骤为:
(1)设计用于估计自动驾驶分布式驱动电动汽车的侧倾角和侧倾角速度的Takagi-Sugeno模糊观测器;
(2)建立Takagi-Sugeno模糊观测器存在可行解的线性矩阵不等式条件,得到满足闭环系统H ∞ 性能的观测器增益矩阵。
6.如权利要求1所述自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法,其特征在于在步骤5)中,所述将期望附加横摆力矩分配至所有轮胎执行器,设计自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配控制方法,求解出所需的轮胎纵向力,通过轮毂电机控制实现对轮胎纵向力的跟踪控制的具体步骤为:
(1)建立自动驾驶分布式驱动电动汽车附加横摆力矩的优化分配的数学模型,采用遗传算法求解自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配问题,得到附加轮胎纵向力;
(2)建立附加轮胎纵向力与车轮半径、轮毂电机的附加外部扭矩之间的关系,通过轮毂电机控制实现对附加轮胎纵向力的跟踪控制。
说 明 书
自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法
技术领域
[0001]本发明属于汽车智能安全与自动驾驶技术领域,特别是涉及一种自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法。
背景技术
[0002]自动驾驶分布式驱动电动汽车的每个车轮均由电动机独立驱动,具有卓越的机动性和控制灵活性,可最大程度减少道路事故的发生,提高交通安全和减少交通拥堵。
[0003]横向控制是自动驾驶分布式驱动电动汽车的核心技术之一,其旨在如何设计控制律以使自动驾驶分布式驱动电动汽车准确、平稳地遵循预先计划的参考路径而行驶。由于自动驾驶分布式驱动电动汽车具有参数非线性和不确定性的特点,因此设计自动驾驶分布式驱动电动汽车的横向控制系统被认为是自动驾驶汽车领域中最具挑战性的任务之一。文献1(Hongyan Guo,Dongpu Cao,Hong Chen,et al.,Model predictive path followingcontrol for autonomous cars considering a measurable disturbance:Implementation,testing,and verification[J].Mechanical Systems and SignalProcessing,2019,118:41-60.)提出了一种自动驾驶汽车横向预测控制方法,并通过试验测试验证了本方法的有效性。文献2(Xuewu Ji,Xiangkun He,Chen Lv,etal.,Adaptive-Neural-Network-Based Robust Lateral Motion Control for Autonomous Vehicle atDriving Limits[J],Control Engineering Practice,2018,76:41-53.)设计了一种基于自适应神经网络的自动驾驶汽车横向控制方法,通过试验表明该控制技术在各种行驶条件下均具有较为理想的车辆动力学控制性能。
[0004]自动驾驶分布式驱动电动汽车的运动过程中容易发生侧向和横向耦合运动,这会对车辆的安全性和乘坐舒适性产生不利影响,因此,自动驾驶分布式驱动电动汽车的横向控制应考虑侧倾效应。此外,当执行器发生故障时,有故障的执行器可能无法提供所需的扭矩,从而破坏自动驾驶分布式驱动电动汽车的横向运动控制。
发明内容
[0005]本发明的目的是针对现有技术存在的上述难题,提供可有效提高侧倾效应和执行器故障下自动驾驶分布式驱动电动汽车自主行驶性能的一种自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法。
[0006]本发明包括以下步骤:
[0007]1)通过车载传感系统实时获取自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息;
[0008]2)基于步骤1)获取的信息,考虑侧倾效应和执行器故障,建立描述参数不确定性和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向控制模型;
[0009]3)设计基于Takagi-Sugeno模糊横向控制模型的自动驾驶分布式驱动电动汽车鲁棒控制策略,实现横向与侧倾耦合运动的多目标协同控制,求解出行驶所需要的前轮转角和附加横摆力矩;
[0010]4)针对自动驾驶分布式驱动电动汽车侧倾角和侧倾角速度的不可测性,构建自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊观测器;
[0011]5)将步骤3)求解出的附加横摆力矩分配至所有轮胎执行器,设计自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配控制方法,求解出所需的轮胎纵向力,通过轮毂电机控制实现对轮胎纵向力的跟踪控制,进而实现自动驾驶分布式驱动电动汽车横向与侧倾综合控制。
[0012]在步骤1)中,所述通过车载传感系统实时获取自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息的具体步骤可为:
[0013](1)通过车载GPS系统实时获取车辆的纵向速度、横向速度和横摆角速度;
[0014](2)通过车载CCD系统实时获取预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息、预瞄点处车辆到参考路径的横向距离偏差信息;
[0015](3)对由GPS和CCD系统获取的自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息进行信息融合。
[0016]在步骤2)中,所述建立描述参数不确定性和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向控制模型的具体步骤可为:
[0017](1)忽略自动驾驶分布式驱动电动汽车的垂直运动和俯仰运动,建立描述自动驾驶分布式驱动电动汽车横向、横摆和侧倾动力学特性的的三自由度动力学模型;
[0018](2)基于预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息和预瞄点处车辆到参考路径的横向距离偏差信息,建立自动驾驶分布式驱动电动汽车的运动学模型;
[0019](3)考虑自动驾驶分布式驱动电动汽车的执行器存在偏置故障和部分失效故障问题,构建自动驾驶分布式驱动电动汽车的执行器故障模型;
[0020](4)结合自动驾驶分布式驱动电动汽车的三自由度动力学模型和运动学模型,考虑侧倾效应和执行器故障,建立描述参数不确定和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向控制模型。
[0021]在步骤3)中,所述设计基于Takagi-Sugeno模糊横向控制模型的自动驾驶分布式驱动电动汽车鲁棒控制策略,实现横向与侧倾耦合运动的多目标协同控制,求解出行驶所需要的前轮转角和附加横摆力矩的具体步骤可为:
[0022](1)设计自动驾驶分布式驱动电动汽车横向与侧倾综合的鲁棒H ∞ 状态反馈控制构型;
[0023](2)将所设计的鲁棒H ∞ 状态反馈控制构型代入自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊横向控制模型,分析自动驾驶分布式驱动电动汽车闭环控制系统的稳定性;
[0024](3)推导自动驾驶分布式驱动电动汽车横向与侧倾鲁棒H ∞ 状态反馈综合控制器存在可行解的线性矩阵不等式条件,得到满足自动驾驶分布式驱动电动汽车闭环系统H ∞ 性能的反馈增益矩阵。
[0025]在步骤4)中,所述构建自动驾驶分布式驱动电动汽车的模糊观测器的具体步骤可为:
[0026](1)设计用于估计自动驾驶分布式驱动电动汽车的侧倾角和侧倾角速度的Takagi-Sugeno模糊观测器;
[0027](2)建立Takagi-Sugeno模糊观测器存在可行解的线性矩阵不等式条件,得到满足闭环系统H ∞ 性能的观测器增益矩阵。
[0028]在步骤5)中,所述将步骤3)求解出的附加横摆力矩分配至所有轮胎执行器,设计自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配控制方法,求解出所需的轮胎纵向力,通过轮毂电机控制实现对轮胎纵向力的跟踪控制的具体步骤可为:
[0029](1)建立自动驾驶分布式驱动电动汽车附加横摆力矩的优化分配的数学模型,采用遗传算法求解自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配问题,得到附加轮胎纵向力;
[0030](2)建立附加纵向轮胎力与车轮半径、轮毂电机的外部扭矩之间的关系,通过轮毂电机控制实现对轮胎纵向力的跟踪控制。
[0031]本发明通过车载传感系统采集自动驾驶分布式驱动电动汽车的行驶状态信息和参考路径信息,考虑侧倾效应和执行器故障,建立具有参数不确定和时变特性的Takagi-Sugeno模糊横向控制模型,设计一种自动驾驶分布式驱动电动汽车鲁棒横向和侧倾综合控制方法,同时针对自动驾驶分布式驱动电动汽车行驶过程中侧倾角和侧倾角速度的不可测性,提出基于Takagi-Sugeno模型的观测器。本发明克服了侧倾效应和执行器故障对自动驾驶分布式驱动电动汽车横向运动控制的影响,提高了自动驾驶分布式驱动电动汽车的自主行驶性能。
附图说明
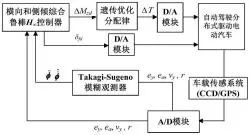
[0032]图1为本发明实施例自动驾驶分布式驱动电动汽车的鲁棒横向与侧倾综合控制系统原理图。
[0033]图2为本发明实施例自动驾驶分布式驱动电动汽车三自由度动力学模型。
[0034]图3为本发明实施例自动驾驶分布式驱动电动汽车运动学模型。
具体实施方式
[0035]以下实施例将结合附图对本发明作进一步说明。
[0036]本发明实施例所述的横向与侧倾综合控制系统包括车载传感模块、A/D和D/A转换器模块、横向和侧向综合鲁棒H ∞ 控制器、遗传优化最优分配模块、Takagi-Sugeno模糊观测器等。所述车载传感模块主要包括GPS模块和CCD模块,GPS系统实时获取车辆的纵向速度、横向速度和横摆角速度,车载CCD系统实时获取预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息、预瞄点处车辆到参考路径的横向距离偏差信息;如图1所示,车载GPS模块及车载视觉系统获取车辆的行驶运动状态信息及参考路径信息,经A/D模块将方位偏差信息e a 、横向距离偏差信息e y 、车辆横向速度v y 、车辆的横摆角速度r等信息传输至横向和侧向综合鲁棒H ∞ 控制器,横向和侧向综合鲁棒H ∞ 控制器实时求出侧倾效应和执行器故障下的自动驾驶分布式驱动电动汽车综合控制所需的前轮转角和附加横摆力矩,Takagi-Sugeno模糊观测器用于估计车辆行驶的侧倾角φ和侧倾角速度 有效解决自动驾驶分布式驱动电动汽车侧倾角和侧倾角速度的不可测性,设计控制分配方法,将附加横摆力矩分配控制输入至所有轮胎执行器,确保自动驾驶分布式驱动电动汽车闭环横向控制系统的稳定性。
[0037]所述自动驾驶分布式驱动电动汽车横向与侧倾综合控制方法实施例,包括以下步骤:
[0038]步骤1:通过车载传感器和车载视觉系统实时获取车辆的行驶运动状态信息及参考路径信息。
[0039]步骤1.1:通过车载GPS系统实时获取车辆的纵向速度、横向速度和横摆角速度。
[0040]步骤1.2:通过车载CCD系统实时获取预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息、预瞄点处车辆到参考路径的横向距离偏差信息。
[0041]步骤1.3:对由GPS和CCD系统获取的自动驾驶分布式驱动电动汽车的行驶运动状态信息及参考路径信息进行信息融合。
[0042]步骤2:基于车载传感系统获取的信息,考虑侧倾效应和执行器故障,建立描述参数不确定性和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊控制模型。
[0043]步骤2.1:忽略自动驾驶分布式驱动电动汽车的垂直运动和俯仰运动,建立描述自动驾驶分布式驱动电动汽车横向、横摆和侧倾动力学特性的的三自由度动力学模型(如图2):
[0044]
[0045]其中,m是车辆质量,m s 是车辆簧载质量,v y 和v x 分别表示车辆的横向和纵向速度,r是车辆的横摆角速度,l f 和l r 分别表示从重心到前后轮轴的距离,I z 表示绕z轴的转动惯量,h s 表示从车辆重心到侧倾中心的距离,I x 表示绕侧倾轴的惯性力矩,K roll 表示总侧倾刚度,C roll 表示总侧倾阻尼,φ表示车辆的侧倾角,g表示重力加速度,ΔM z 表示附加外部横摆力矩,F yf 和F yr 分别表示前轮和后轮的侧向轮胎力。
[0046]F yf 和F yr 可以由前后轮胎滑移角a f 和a r 表示为:
[0047]F yf =C f a f ,F yr =C r a r (2)
[0048]其中
[0049]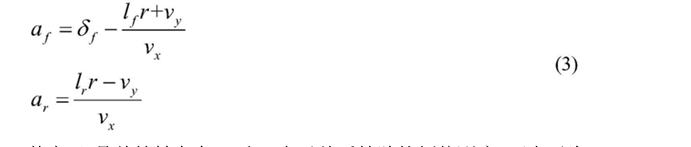
[0050]其中,δ f 是前轮转向角;C f 和C r 表示前后轮胎的侧偏刚度,可表示为:
[0051]
[0052]其中,ξ f 和ξ r 是随时间变化的参数,满足|ξ f |<1和|ξ r |<1。C 0f 和C 0r 分别是C f 和C r 的标称值,表示为:
[0053]
[0054]其中,C max f 和C min f 是C f 的最大值和最小值,C max r 和C min r 是C r 的最大值和最小值, 和 表示为
[0055]
[0056]步骤2.2:基于预瞄点处参考路径的切线方向与车辆前进方向之间的方位偏差信息e a 和预瞄点处车辆到参考路径的横向距离偏差信息e y ,建立自动驾驶分布式驱动电动汽车的运动学模型(如图3):
[0057]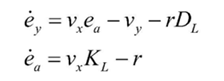
[0058]其中,D L 表示车辆都预瞄点的距离,K L 表示参考路径曲率。
[0059]步骤2.3:考虑自动驾驶分布式驱动电动汽车的执行器存在偏置故障和部分失效故障,构建自动驾驶分布式驱动电动汽车执行器具有偏置故障和部分失效故障的数学模型:
[0060]
[0061]其中,δ fd 和ΔM zd 分别表示执行器期望前轮转角和期望附加横摆力矩,δ f 和ΔM z 分别表示执行器实际前轮转角和实际附加横摆力矩,η f 和η z 是随时间变化的常数,满足0<η f ≤1和0<η z ≤1, 和 表示偏置故障。
[0062]步骤2.4:综合自动驾驶分布式驱动电动汽车的三自由度动力学模型和运动学模型,考虑执行器故障,建立描述参数不确定性和执行器故障的自动驾驶分布式驱动电动汽车横向与侧倾综合控制模型:
[0063]
[0064]其中:
[0065]
[0066]
[0067]
[0068] fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
[0069]
[0070]其中,状态向量 控制输入向量u=[δ fd ΔM zd ] T ,有界外部扰动向量 测量输出向量y=[e y e a ] T 。
[0071]步骤2.5:由于前轮轮胎行驶路况通常是一致的,基于假设ξ f =ξ r ,可以给出不确定项的数学描述:
[0072][ΔA ΔB]=GF[N 1 N 2 ],ΔE=GFN 3 (10)
[0073]
[0074]
[0075]
[0076]步骤2.6:由于自动驾驶分布式驱动电动汽车的纵向速度v x 具有随时间变化且有界的特性,可以写成:
[0077]
[0078]其中, 是纵向速度的最大值, v x 是纵向速度的最小值。h 1 (ξ(t))和h 2 (ξ(t))是隶属度函数:
[0079] (12)
[0080]
[0081]步骤2.7:建立描述执行器故障、参数不确定性和时变特性的自动驾驶分布式驱动电动汽车Takagi-Sugeno模糊横向与侧倾综合控制模型:
[0082]
[0083]步骤3:设计基于Takagi-Sugeno状态观测器的自动驾驶分布式驱动电动汽车鲁棒控制策略,实现横向与侧倾耦合运动的多目标协同控制,求解出行驶所需要的前轮转角和附加横摆力矩。
[0084]步骤3.1:设计自动驾驶分布式驱动电动汽车横向与侧倾综合控制的鲁棒H ∞ 状态反馈控制器结构,如下所示:
[0085]
[0086]步骤3.2:将所设计的鲁棒H ∞ 状态反馈控制器代入自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊控制模型,建立闭环综合控制系统:
[0087]
[0088]其中
[0089]
[0090]
[0091]步骤3.3:求解鲁棒H ∞ 状态反馈控制器存在可行解的线性矩阵不等式条件:
[0092]考虑自动驾驶分布式驱动电动汽车的闭环综合控制系统(16),对给定的标量γ 1 >0和常数 若存在对称正定矩阵P>0和矩阵Y j 使得
[0093]P>0 (19)
[0094]Ξ ii <0 (20)
[0095]Ξ ij +Ξ ji <0 (21)
[0096]其中,
[0097]
[0098]
[0099]
[0100]则存在控制器(15),使得闭环综合控制系统(16)在存在参数不确定性和外部干扰的情况下具有H ∞ 性能:
[0101]
[0102]自动驾驶分布式驱动电动汽车鲁棒H ∞ 状态反馈控制增益矩阵K j 为:
[0103]K j =Y j P -1 (26)
[0104]步骤4:针对自动驾驶分布式驱动电动汽车侧倾角和侧倾角速度的不可测性,构建自动驾驶分布式驱动电动汽车的Takagi-Sugeno模糊观测器。
[0105]步骤4.1:设计用于估计自动驾驶分布式驱动电动汽车的侧倾角和侧倾角速度的Takagi-Sugeno模糊观测器结构形式:
[0106]
[0107]其中,
[0108]
[0109]其中 Φ是对称正定矩阵,υ 0 、υ 1 和σ a 是正标量,L i 是观测器的增益,它保证估计状态 到实际状态x的渐近收敛,变量α是用于补偿由模型不确定性引起的估计误差。
[0110]步骤4.2:定义状态估计误差为:
[0111]
[0112]则状态估计误差的状态空间模型为:
[0113]
[0114]其中:
[0115]
[0116]满足
[0117]步骤4.3:建立Takagi-Sugeno模糊观测器存在可行解的线性矩阵不等式条件,得到满足闭环系统H ∞ 性能的观测器增益矩阵;考虑状态估计误差的状态空间模型(30),若存在对称正定矩阵Φ=Φ T >0和矩阵Υ i 使得
[0118]
[0119]成立,则系统稳定,且从 到状态估计误差e(t)的传递函数L 2 增益小于γ 2 ,则可得观测器增益L i 为:
[0120]L i =Φ -1 Υ i (33)
[0121]步骤5:将求解出的期望附加横摆力矩ΔM zd 分配至所有轮胎执行器,设计自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配控制方法,求解出所需的轮胎纵向力,通过轮毂电机控制实现对轮胎纵向力的跟踪控制。
[0122]步骤5.1:建立自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配的数学模型,如下所示:
[0123]
[0124]其中,
[0125]Θ F =[-cos δ f l s +sin δ f l f cos δ f l s +sin δ f l f -l s l s ] (35)
[0126]ΔF x =[ΔF xfl ΔF xfr ΔF xrl ΔF xrr ] T (36)
[0127]W F 和W e 加权正定对角矩阵,ΔF xfl 、ΔF xfr 、ΔF xrl 和ΔF xrr 表示每个车轮轮的附加轮胎纵向力,ΔF xv,min 和ΔF xv,max 表示附加轮胎纵向力的最小值和最大值,l s 表示路径宽度的一半。
[0128]步骤5.2:采用遗传算法求解自动驾驶分布式驱动电动汽车附加横摆力矩的最优分配问题,得到期望的附加轮胎纵向力ΔF xd 。
[0129]步骤5.3:建立附加纵向轮胎力与车轮半径、轮毂电机的附加外部扭矩之间的关系:
[0130]ΔT=ΔF xd t R (37)
[0131]其中ΔT=[ΔT fl ΔT fr ΔT rl ΔT rr ]是轮毂电机所需的附加外部扭矩,t R 是轮胎半径;通过轮毂电机控制实现对附加轮胎纵向力的跟踪控制,实现自动驾驶分布式驱动电动汽车横向与侧倾综合控制。
[0132]以上内容是结合优选技术方案对本发明所做的进一步详细说明,不能认定发明的具体实施仅限于这些说明。对本发明所属技术领域的普通技术人员来说,在不脱离本发明的构思的前提下,还可以做出简单的推演及替换,都应当视为本发明的保护范围。
说 明 书 附 图
______________________________________
该文资料搜集自网络,仅用作学习分享,不做商业用途,若侵权,后台联系小编进行删除
点击左下角阅读原文,即可在线阅读原文。